Joint Commitment in Human Cooperative Hunting through an “Imagined We”
Abstract
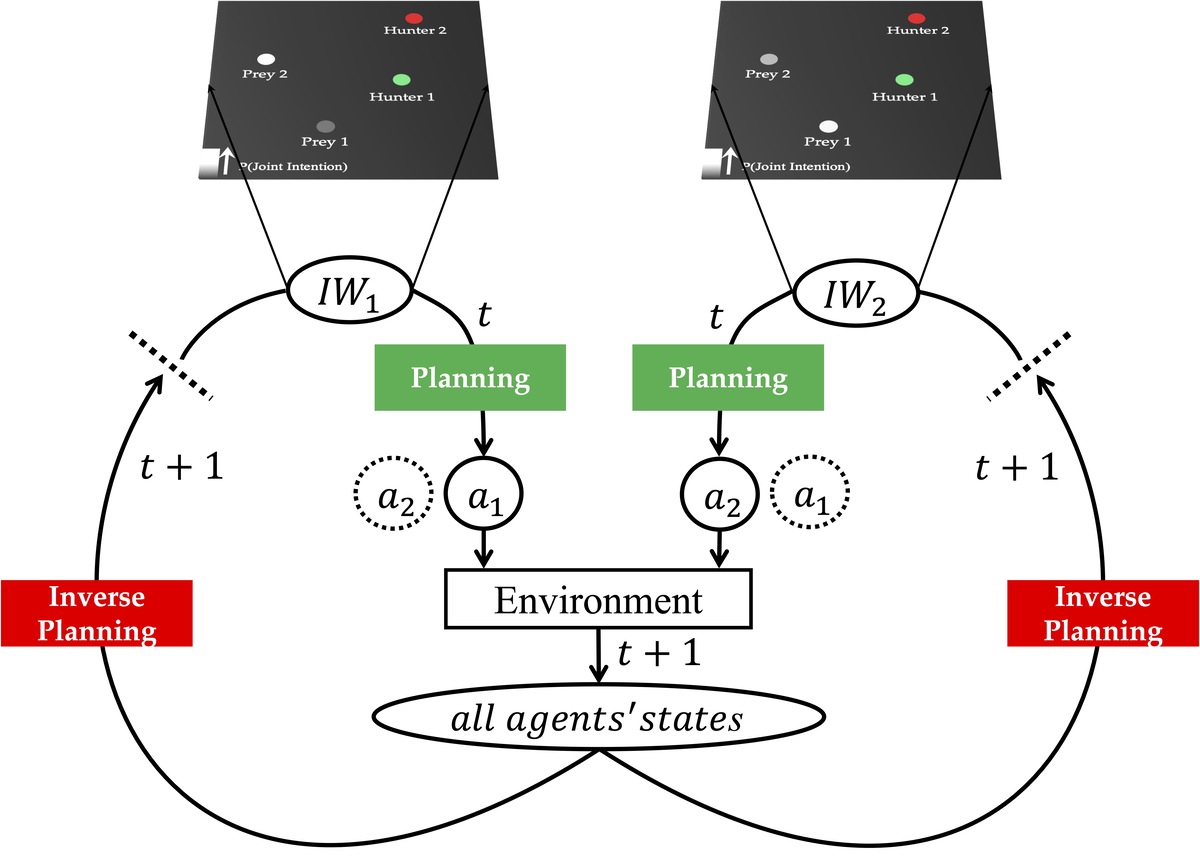
Jointly selecting a goal out of multiple comparable goals and maintaining team’s joint commitment to that goal pose challenges in human cooperation. Here we test joint commitment in a multi-player hunting game by combining psychophysics and computational modelling. Joint commitment is modelled through an "Imagined We" (IW) approach, wherein each agent uses Bayesian inference to reason the intention of “We”, an imagined supraindividual agent that controls all agents as body parts. This model is compared against a Reward Sharing (RS) model, which posits cooperation as sharing reward through multi-agent reinforcement learning (MARL). We found that both humans and IW, but not RS, could maintain high team performance by jointly committing to a single prey and coordinate to catch it, regardless of prey number or speed. Human observers also rated all members of the human and IW teams as having high contributions to the catch irrespective of their proximity to the prey, suggesting their high-quality hunting resulted from sophisticated cooperation rather than individual strategies. IW hunters can not only cooperate with its own kind but also with humans, with human-IW teams mirroring the hunting performance and teaming experience of human-only teams. However, substituting more RS hunters reduced both performance and teaming experience. In conclusion, this study demonstrates that human archive cooperation through joint commitment that enforces the team to focus on a single goal, rather than merely motivating team members through reward sharing. By extending the joint commitment theory to visually grounded cooperation, our research sheds light on building machines that can cooperate with humans in an intuitive and trustworthy manner.
Demo1
Human Team, Set Size 4: Human team can catch the prey when there are four prey by jointly commit to a single prey and coordinae to corner it.
Demo2
IW Team, Set Size 4: Even though initially, the joint intention of "We" inferred by the Blue hunter did not align with those of the Red and Green hunters, eventually, after a while, the IW inferences of the three hunters converged onto the same prey and they caught it.
Demo3
RS Team, Set Size 4: The three RS hunters each pursued different prey, ultimately leading to them not catching any prey.
Demo4
Human-IW Hybrid Team, Set Size 4: The Blue one is an IW hunter. At first, the three hunters did not chase the same prey. Blue IW hunter initially followed the Red human hunter's prey. But when the Green human hunter started to pursue this prey, the Blue IW hunter coincidentally switched its inferred joint intention another prey. However, ultimately, the joint intention of the Blue IW hunter converged onto the same prey that the two human hunters pursued.
Demo5
Human-RS Hybrid Team, Set Size 4: The Red one is an RS hunter. Initially, the human hunters puresed the same prey, but the Red RS hunter always pursed another prey. This ultimately led the Green human hunter to stop pursuing together with the Blue human hunter. In the end, the three hunters each pursued different prey.
More demos
https://sites.google.com/view/imagined-we